ارتعاش مکانیکی چیست؟ ارتعاشات مکانیکی: چیست؟ ارتعاشات مکانیکی قلب
ارتعاشات مکانیکی
1. ارتعاشات مکانیکی
1.1 ارتعاشات مکانیکی: ارتعاشات هارمونیک، میرایی و اجباری
1.2 خود نوسانی
1.3 تجزیه نوسانات به یک طیف هارمونیک. استفاده از تجزیه و تحلیل هارمونیک برای پردازش داده های تشخیصی
1.4 امواج مکانیکی، انواع و سرعت انتشار آنها
1.5 ویژگی های انرژی موج
فهرست منابع استفاده شده
1. ارتعاشات مکانیکی
1.1 ارتعاشات مکانیکی: ارتعاشات هارمونیک، میرایی و اجباری
نوسانات به فرآیندهایی گفته می شود که در یک درجه تکرارپذیری متفاوت هستند (نوسان پاندول ساعت، ارتعاش یک رشته یا پایه های یک چنگال تنظیم، ولتاژ بین صفحات خازن در مدار رادیویی، کار قلب).
بسته به ماهیت فیزیکی فرآیند تکرار، نوسانات متمایز می شوند: مکانیکی، الکترومغناطیسی، الکترومکانیکی و غیره. ما ارتعاشات مکانیکی را در نظر خواهیم گرفت. نوساناتی که در غیاب اصطکاک و نیروهای خارجی رخ می دهند، مناسب نامیده می شوند. فرکانس آنها فقط به ویژگی های سیستم بستگی دارد.
ساده ترین آنها نوسانات هارمونیک هستند، یعنی. چنین نوساناتی که در آن مقدار نوسان (مثلاً انحراف آونگ) طبق قانون سینوس یا کسینوس با زمان تغییر می کند.
معادله دیفرانسیل نوسانات هارمونیک
ساده ترین سیستم نوسانی را در نظر بگیرید: توپی به جرم m روی فنر معلق است.
در این حالت نیروی الاستیک F1 نیروی گرانش میلی گرم را متعادل می کند. اگر توپ با فاصله جابه جا شود ایکس، سپس یک نیروی الاستیک بزرگ (F 1 + و) تغییر در نیروی کشسان طبق قانون هوک متناسب با تغییر طول فنر یا جابجایی توپ x است:
که در آن k سفتی فنر است. علامت "-" نشان دهنده این واقعیت است که جابجایی و نیرو دارند جهت های مخالف.
که در آن (w 0 t + a 0) = a فاز نوسانات است. a 0 - فاز اولیه در t = 0. w 0 - فرکانس دایره ای نوسانات. A دامنه آنهاست.
بنابراین، افست x با زمان مطابق قانون کسینوس تغییر می کند.
در نتیجه، حرکت یک سیستم تحت تأثیر نیرویی به شکل f = - kx یک نوسان هارمونیک است.
برای آونگ فنری بدست می آوریم:
فرکانس دایره ای مربوط به نسبت n معمولی است: .
انرژی در نوسانات هارمونیک
اجازه دهید دریابیم که چگونه جنبشی اکو پتانسیل Epانرژی ارتعاش هارمونیک انرژی جنبشی عبارت است از:
, (4)که در آن k = m w 0 2 .
انرژی پتانسیل از فرمول انرژی پتانسیل برای تغییر شکل الاستیک و با استفاده از (3) بدست می آید:
(5)اضافه کردن (4) و (5) با در نظر گرفتن رابطه
، ما گرفتیم:E = E K + E P =
. (6)بنابراین، انرژی کل یک نوسان هارمونیک در غیاب نیروهای اصطکاک ثابت می ماند؛ در طول فرآیند نوسانی، انرژی جنبشی به انرژی پتانسیل تبدیل می شود و بالعکس.
ارتعاشات میرا شده
نوساناتی که در سیستم در غیاب نیروهای خارجی (اما در حضور تلفات اصطکاک یا تشعشع) رخ میدهند، آزاد نامیده میشوند. فرکانس نوسانات آزاد به خواص سیستم و شدت تلفات بستگی دارد.
وجود اصطکاک منجر به نوسانات میرا می شود. نوسانات با دامنه کاهشی را میرا می گویند.
فرض کنید علاوه بر نیروی شبه الاستیک، سیستم تحت تأثیر نیروهای مقاومتی محیط (اصطکاک) قرار می گیرد، پس قانون دوم نیوتن به شکل زیر است:
. (7)ما خود را به در نظر گرفتن نوسانات کوچک محدود می کنیم، سپس سرعت سیستم نیز کوچک خواهد بود و در سرعت های پایین، نیروی مقاومت متناسب با سرعت است:
, (8)جایی که r ضریب درگ محیط است. امضا کردن " - "به دلیل این واقعیت است که F tr و V جهت مخالف دارند.
اجازه دهید (8) را با (7) جایگزین کنیم. سپس
یامشخص کن
,
جایی که b ضریب میرایی است، w 0 فرکانس دایره ای نوسانات طبیعی است. سپس
حل این معادله اساساً به علامت تفاوت بستگی دارد: w 2 = w 0 2 -b 2 ، جایی که w فرکانس دایره ای نوسانات میرا شده است. در شرایط w 0 2 -b 2 > 0، w یک مقدار واقعی است و جواب (3) به صورت زیر خواهد بود:
نمودار این تابع در شکل نشان داده شده است.
برنج. 2. نوسانات میرایی.
خط نقطه چین تغییر دامنه را نشان می دهد: A = ±A 0 e - b t .
دوره نوسانات میرا به ضریب اصطکاک بستگی دارد و برابر است با:
(11)با مقاومت کمی از محیط (b2< از فرمول بیان کننده قانون کاهش دامنه نوسانات، می توان مطمئن شد که نسبت دامنه های جدا شده از یکدیگر با فاصله یک دوره (T) در کل فرآیند میرایی ثابت می ماند. در واقع، دامنههای نوسان، که با بازهای از یک دوره از هم جدا میشوند، به صورت زیر بیان میشوند: این رابطه نامیده می شود
این رابطه:
این مقدار کاهش میرایی لگاریتمی در هر دوره نامیده می شود.
برای میرایی قوی b 2 > w02، از فرمول (11) نتیجه می گیرد که دوره نوسان یک کمیت خیالی است. در این حالت، حرکت ماهیت غیر پریودیک (غیر تناوبی) دارد - سیستمی که از وضعیت تعادل خارج شده است بدون نوسان به وضعیت تعادل باز می گردد. کدام یک از این راه ها سیستم به تعادل می رسد بستگی به شرایط اولیه دارد.
ارتعاشات اجباری طنین
مجبورارتعاشاتی نامیده می شود که در یک سیستم نوسانی تحت تأثیر یک نیروی خارجی در حال تغییر دوره ای (نیروی محرک) رخ می دهد. اجازه دهید نیروی محرکه با زمان مطابق قانون هارمونیک تغییر کند: f = F0 cosW t، که در آن F0 دامنه است، W فرکانس دایره ای نیروی محرکه است.
هنگام تنظیم معادله حرکت، باید علاوه بر نیروی محرکه، نیروهایی را نیز در نظر گرفت که در هنگام ارتعاشات آزاد در سیستم وارد می شوند، یعنی نیروی شبه الاستیک و نیروی پسا محیط. سپس معادله حرکت (قانون دوم نیوتن) به صورت زیر نوشته می شود:
با تقسیم این معادله بر m و حرکت عبارت های dx و d 2 x به سمت چپ، یک معادله دیفرانسیل خطی مرتبه دوم غیر همگن به دست می آوریم.
نوسانات - این حرکت یک جسم است که در طی آن بارها و بارها در امتداد همان مسیر حرکت می کند و از همان نقاط در فضا عبور می کند. نمونه هایی از اجسام در حال نوسان عبارتند از آونگ ساعت، سیم ویولن یا پیانو، ارتعاشات ماشین.
ارتعاشات نقش مهمی در بسیاری از پدیده های فیزیکی خارج از حوزه مکانیک دارند. به عنوان مثال، ولتاژ و جریان در مدارهای الکتریکی می تواند نوسان داشته باشد. نمونه های بیولوژیکی نوسانات عبارتند از انقباضات قلب، نبض های شریانی و تولید صدا تارهای صوتی.
اگرچه ماهیت فیزیکی سیستم های نوسانی ممکن است به طور قابل توجهی متفاوت باشد، انواع مختلفی از نوسانات را می توان از نظر کمی به روشی مشابه مشخص کرد. کمیت فیزیکی که با زمان در طول حرکت نوسانی تغییر می کند نامیده می شود جابه جایی
. دامنه
حداکثر جابجایی جسم در حال نوسان را از موقعیت تعادل نشان می دهد. نوسان کامل، یا چرخه
- این حرکتی است که در آن جسمی که با دامنه معینی از حالت تعادل خارج شده است، به این موقعیت باز می گردد، در جهت مخالف به حداکثر جابجایی منحرف می شود و به موقعیت اولیه خود باز می گردد. دوره نوسان T
زمان مورد نیاز برای تکمیل یک چرخه کامل است. تعداد نوسانات در واحد زمان است فرکانس نوسان
.
نوسان هارمونیک ساده
در برخی از اجسام، هنگامی که آنها کشیده یا فشرده می شوند، نیروهایی ایجاد می شوند که با این فرآیندها مقابله می کنند. این نیروها مستقیماً با طول کشش یا فشار متناسب هستند. چشمه ها این خاصیت را دارند. هنگامی که جسم معلق از فنر از وضعیت تعادل خود منحرف می شود و سپس آزاد می شود، حرکت آن یک نوسان هارمونیک ساده است.
جسمی را با جرم در نظر بگیرید مترروی فنر در وضعیت تعادل معلق است. با حرکت دادن بدن به سمت پایین می توان باعث نوسان بدن شد. اگر - جابجایی بدن از وضعیت تعادل، در آن صورت نیرویی در بهار ایجاد می شود اف(نیروی الاستیسیته)، در جهت مخالف جابجایی هدایت می شود. طبق قانون هوک، نیروی الاستیک متناسب با جابجایی است کنترل F = -k S، جایی که کثابتی است که به خواص کشسانی فنر بستگی دارد. نیرو منفی است زیرا تمایل دارد بدن را به حالت تعادل بازگرداند.
بر روی بدن با یک جرم عمل می کند متر،نیروی الاستیک به آن شتابی در جهت جابجایی می دهد. طبق قانون نیوتن F=ma، جایی که a = d 2 S/d 2 t. برای ساده کردن استدلال زیر، از اصطکاک و ویسکوزیته در یک سیستم نوسانی غفلت می کنیم. در این حالت دامنه نوسانات با گذشت زمان تغییر نخواهد کرد.
اگر هیچ نیروی خارجی (حتی مقاومت محیط) روی جسم نوسانی وارد نشود، نوسانات با فرکانس مشخصی انجام می شود. به این نوسانات آزاد می گویند. دامنه چنین نوساناتی ثابت می ماند.
بدین ترتیب، m d 2 S/d 2 t = -k S(یک). با جابجایی تمام شرایط برابری و تقسیم آنها بر متر،معادلات را می گیریم d 2 S/d 2 t +(k/m)·
اس = 0
,
و سپس d 2 S/d 2 t + ω 0 2·
اس = 0
(2)، کجا k/m =ω 0 2
معادله (2) است معادله دیفرانسیل یک نوسان هارمونیک ساده.
حل معادله (2) دو تابع به دست می دهد:
S = یک گناه ( ω 0 t + φ 0)
(3) و S = Acos( ω 0 t + φ 0)
(4)
بنابراین، اگر جسمی از جرم مترنوسانات هارمونیک ساده را انجام می دهد، تغییر در جابجایی این جسم از نقطه تعادل در زمان طبق قانون سینوس یا کسینوس انجام می شود.
(ω 0 t + φ 0) - فاز نوسان با فاز اولیه φ 0 . فازخاصیت حرکت نوسانی است که میزان جابجایی بدن را در هر زمان مشخص می کند. فاز با رادیان اندازه گیری می شود.
مقدار فرکانس زاویه ای یا دایره ای نامیده می شود. بر حسب رادیان در ثانیه اندازه گیری می شود ω 0 = 2πν یا ω 0 = 2 π / تی (5)
نموداری از معادله یک نوسان هارمونیک ساده نشان داده شده است برنج. یکی. جسمی که در ابتدا با فاصله جابجا شده است الف - دامنه هانوسانات ,
و سپس رها کنید، همچنان به نوسانی ادامه می دهد -آو قبل از آپشت
زمان تی- دوره نوسان.
عکس. 1.
بنابراین، در جریان یک نوسان هارمونیک ساده، جابجایی بدن در طول یک موج سینوسی یا کسینوس تغییر می کند. بنابراین، یک نوسان هارمونیک ساده اغلب به عنوان نوسان سینوسی شناخته می شود.
یک نوسان هارمونیک ساده دارای ویژگی های اصلی زیر است:
الف) جسم متحرک به طور متناوب در دو طرف موقعیت تعادل قرار دارد.
ب) بدن حرکت خود را در یک بازه زمانی معین تکرار می کند.
ج) شتاب بدن همیشه متناسب با جابجایی و جهت مخالف آن است.
ه) از نظر گرافیکی، این نوع نوسان توسط یک سینوسی توصیف می شود.
نوسان میرایی
یک نوسان هارمونیک ساده نمی تواند به طور نامحدود در یک دامنه ثابت ادامه یابد. در شرایط واقعی، پس از مدتی، نوسانات هارمونیک متوقف می شود. به این گونه نوسانات هارمونیک در سیستم های واقعی گفته می شود ارتعاشات میرایی (شکل 2 )
. عمل نیروهای خارجی، مانند اصطکاک و ویسکوزیته، منجر به کاهش دامنه نوسانات با خاتمه بعدی آنها می شود. این نیروها انرژی ارتعاشات را کاهش می دهند. آنها نامیده می شوند نیروهای اتلاف کنندهاز آنجایی که آنها به اتلاف پتانسیل و انرژی جنبشی اجسام ماکروسکوپی به انرژی حرکت حرارتی اتم ها و مولکول های بدن کمک می کنند.
 شکل 2.
شکل 2.
مقدار نیروهای اتلاف کننده به سرعت بدن بستگی دارد. اگر سرعت ν نسبتاً کوچک باشد، نیروی اتلاف کننده افبا این سرعت نسبت مستقیم دارد. F tr \u003d -rν \u003d -r dS / dt (6)
اینجا rیک ضریب ثابت، مستقل از سرعت یا فرکانس نوسان است. علامت منفی نشان می دهد که نیروی ترمز بر خلاف بردار سرعت است.
با در نظر گرفتن عمل نیروهای اتلاف، معادله دیفرانسیل یک نوسان میرایی هارمونیک به شکل زیر است: متر · d 2 S/d 2 t= -kS - r dS/dt .
با حرکت دادن تمام جمله های تساوی به یک سمت، تقسیم هر جمله بر m و جایگزینی k/m = ω 2 ,r/m = 2β، به دست می آید. معادله دیفرانسیل نوسانات میرایی هارمونیک آزاد
که β ضریب میرایی است که میرایی نوسانات را در واحد زمان مشخص می کند.
جواب معادله تابع است S \u003d A 0 e -βt sin (ωt + φ 0) (8)
رابطه (8) نشان می دهد که دامنه نوسان هارمونیک با گذشت زمان به صورت تصاعدی کاهش می یابد. فرکانس نوسانات میرا شده توسط معادله تعیین می شود ω = √(ω 0 2- β 2) (9)
اگر به دلیل نوسان بزرگ نتواند رخ دهد، آنگاه سیستم در امتداد یک مسیر نمایی بدون نوسان به موقعیت تعادل خود باز می گردد.
نوسان و رزونانس اجباری
اگر هیچ انرژی خارجی به سیستم نوسانی داده نشود، دامنه نوسان هارمونیک با گذشت زمان به دلیل اثرات اتلاف کننده کاهش می یابد. عمل تناوبی نیرو می تواند دامنه نوسانات را افزایش دهد. اکنون نوسان با گذشت زمان محو نمی شود، زیرا انرژی از دست رفته در طول هر چرخه توسط یک نیروی خارجی دوباره پر می شود. اگر تعادل این دو انرژی حاصل شود، دامنه نوسانات ثابت می ماند. این اثر به نسبت فرکانس نیروی محرک ω و فرکانس نوسان طبیعی سیستم ω 0 بستگی دارد.
اگر جسم تحت تأثیر نیروی تناوبی خارجی با بسامد این نیروی خارجی نوسان کند، نوسان جسم نامیده می شود. مجبور شد.
اگر نیروی خارجی فرکانس مشخصی داشته باشد، انرژی یک نیروی خارجی بیشترین تأثیر را بر نوسانات سیستم دارد. این فرکانس باید همان فرکانس نوسانات طبیعی سیستم باشد که این سیستم در غیاب نیروهای خارجی انجام می دهد. در این صورت اتفاق می افتد رزونانس- پدیده افزایش شدید دامنه نوسانات هنگامی که فرکانس نیروی محرکه با فرکانس نوسانات طبیعی سیستم مطابقت دارد.
امواج مکانیکی
انتشار ارتعاشات از یک مکان به مکان دیگر حرکت موجی یا به سادگی نامیده می شود موج.
امواج مکانیکی در نتیجه نوسانات هارمونیک ساده ذرات محیط از موقعیت متوسط آنها تشکیل می شوند. ماده رسانه از جایی به جای دیگر حرکت نمی کند. اما ذرات محیطی که انرژی را به یکدیگر منتقل می کنند برای انتشار امواج مکانیکی ضروری هستند.
بنابراین، موج مکانیکی اختلال در محیط مادی است که با سرعت معینی بدون تغییر شکل از این محیط عبور می کند.
اگر سنگی در آب انداخته شود، از محل مزاحمت مدیوم، تک موجی جاری می شود. با این حال، امواج گاهی اوقات می توانند دوره ای باشند. به عنوان مثال، یک چنگال تنظیم ارتعاشی، فشرده سازی متناوب و کمیاب شدن هوای اطراف خود را ایجاد می کند. این آشفتگی ها که به عنوان صدا درک می شوند، به صورت دوره ای در فرکانس چنگال تنظیم رخ می دهند.
دو نوع امواج مکانیکی وجود دارد.
(1) موج عرضی. این نوع موج با ارتعاش ذرات محیط در زاویه قائم نسبت به جهت انتشار موج مشخص می شود. امواج مکانیکی عرضی فقط در جامدات و روی سطح مایعات می تواند رخ دهد.
در یک موج عرضی، تمام ذرات محیط یک نوسان هارمونیک ساده در اطراف موقعیت های متوسط خود انجام می دهند. موقعیت حداکثر جابجایی رو به بالا را می گویند اوج"، و موقعیت حداکثر شیفت به پایین - " افسردگیفاصله بین دو قله یا فرورفتگی بعدی را طول موج عرضی λ می گویند.
(2) موج طولی. این نوع امواج با ارتعاشات ذرات محیط در جهت انتشار موج مشخص می شود. امواج طولی می توانند در مایعات، گازها و جامدات منتشر شوند.
در یک موج طولی، تمام ذرات محیط نیز یک نوسان هارمونیک ساده در اطراف موقعیت متوسط خود انجام می دهند. در برخی مکان ها، ذرات محیط نزدیک تر و در مکان های دیگر - دورتر از حالت عادی قرار دارند.
به مکان هایی که ذرات در آنها نزدیک به هم هستند، منطقه می گویند. فشرده سازی، و مکانهایی که از یکدیگر دور هستند - مناطق کمیاب شدن. فاصله بین دو فشرده سازی متوالی یا نادری را طول موج طولی می گویند.
موارد زیر وجود دارد ویژگی های موج.
(1) دامنه- حداکثر جابجایی یک ذره در حال نوسان محیط از موقعیت تعادل آن ( آ).
(2) عادت زنانهزمان مورد نیاز برای یک ذره برای تکمیل یک نوسان کامل ( تی).
(3) فرکانس- تعداد ارتعاشات تولید شده توسط یک ذره از محیط در واحد زمان (ν). یک رابطه معکوس بین فرکانس موج و دوره آن وجود دارد: ν = 1/T .
(4) فازذره در حال نوسان در هر لحظه موقعیت و جهت حرکت آن را در یک لحظه معین تعیین می کند. فاز کسری از طول موج یا دوره زمانی است.
(5) سرعتموج سرعت انتشار اوج موج (v) در فضا است.
مجموعه ای از ذرات متوسط که در همان فاز در نوسان هستند، جبهه موجی را تشکیل می دهند. از این نظر امواج به دو نوع تقسیم می شوند.
(1) اگر منبع موج نقطه ای باشد که از آن در همه جهات منتشر می شود، پس موج کروی.
(2) اگر منبع موج یک سطح صاف نوسانی باشد، پس موج هواپیما.
جابجایی ذرات یک موج مسطح را می توان با یک معادله کلی برای همه انواع حرکت موج توصیف کرد: S = A sin ω (t - x/v) (10)
این بدان معنی است که مقدار افست ( اس) برای هر مقدار زمانی (ت) و فاصله از منبع موج ( ایکس) بستگی به دامنه نوسان دارد ( آ)، فرکانس زاویه ای ( ω
) و سرعت موج (v).
اثر داپلر
اثر داپلر تغییر در فرکانس یک موج است که توسط ناظر (گیرنده) به دلیل حرکت نسبی منبع موج و ناظر درک می شود. اگر منبع موج به ناظر نزدیک شود، تعداد امواجی که در هر ثانیه به ناظر امواج میرسند از موج ساطع شده توسط منبع موج بیشتر میشود. اگر منبع موج از ناظر دور شود، تعداد امواج ساطع شده بیشتر از امواجی است که به سمت ناظر می رسند.
اگر ناظر نسبت به یک منبع ثابت حرکت کند، اثر مشابهی به دنبال دارد.
یک مثال از اثر داپلر تغییر در فرکانس سوت قطار هنگام نزدیک شدن و دور شدن از ناظر است.
معادله کلی برای اثر داپلر است
در اینجا منبع ν فرکانس امواجی است که از منبع ساطع می شود و گیرنده ν فرکانس امواجی است که توسط ناظر درک می شود. ν 0 سرعت امواج در یک محیط ساکن، ν دریافت کننده و ν منبع به ترتیب سرعت ناظر و منبع موج است. علائم بالایی در فرمول به حالتی اشاره دارد که منبع و ناظر به سمت یکدیگر حرکت می کنند. علائم پایین به حالتی اشاره دارد که منبع و ناظر امواج از یکدیگر دور می شوند.
تغییر فرکانس امواج ناشی از اثر داپلر را تغییر فرکانس داپلر می گویند. از این پدیده برای اندازه گیری سرعت حرکت اجسام مختلف از جمله گلبول های قرمز در رگ های خونی استفاده می شود.
مشاهده وظایف در مورد موضوع "
1. نوسانات. نوسانات دوره ای ارتعاشات هارمونیک
2. ارتعاشات رایگان. نوسانات میرا نشده و میرا شده.
3. ارتعاشات اجباری. طنین.
4. مقایسه فرآیندهای نوسانی. انرژی نوسانات هارمونیک میرایی نشده
5. خود نوسانات.
6. نوسانات بدن انسان و ثبت آنها.
7. مفاهیم و فرمول های اساسی.
8. وظایف.
1.1. نوسانات. نوسانات دوره ای
ارتعاشات هارمونیک
نوساناتفرآیندهایی که در درجات مختلف تکرار متفاوت هستند نامیده می شوند.
مکررفرآیندهایی به طور مداوم در داخل هر موجود زنده رخ می دهد، به عنوان مثال: انقباضات قلب، عملکرد ریه. وقتی سرد می شویم می لرزیم. ما به لطف ارتعاشات پرده گوش و تارهای صوتی می شنویم و صحبت می کنیم. هنگام راه رفتن، پاهای ما حرکات نوسانی انجام می دهند. اتم هایی که باعث ارتعاش ما می شوند. دنیایی که ما در آن زندگی می کنیم به طور قابل توجهی مستعد نوسانات است.
بسته به ماهیت فیزیکی فرآیند تکرار، نوسانات متمایز می شوند: مکانیکی، الکتریکی و غیره. این سخنرانی بحث می کند ارتعاشات مکانیکی
نوسانات دوره ای
تناوبیچنین نوساناتی نامیده می شود که در آن تمام ویژگی های حرکت پس از مدت زمان معینی تکرار می شود.
برای نوسانات دوره ای، از ویژگی های زیر استفاده می شود:
دوره نوسان T، برابر با زمانی است که در طی آن یک نوسان کامل انجام می شود.
فرکانس نوسانν، برابر با تعداد نوسانات در ثانیه (ν = 1/T)؛
دامنه نوسان A، برابر با حداکثر جابجایی از موقعیت تعادل.
ارتعاشات هارمونیک
جایگاه ویژه ای در میان نوسانات دوره ای اشغال شده است هارمونیکنوسانات اهمیت آنها به دلایل زیر است. اولاً، نوسانات در طبیعت و فناوری اغلب دارای شخصیتی بسیار نزدیک به هارمونیک هستند، و ثانیاً، فرآیندهای تناوبی با شکل متفاوت (با وابستگی زمانی متفاوت) را می توان به عنوان برهم نهی چندین نوسان هارمونیک نشان داد.
ارتعاشات هارمونیک- اینها نوساناتی هستند که در آنها مقدار مشاهده شده طبق قانون سینوس یا کسینوس در زمان تغییر می کند:
در ریاضیات به توابع از این دست گفته می شود هارمونیک،بنابراین، نوسانات توصیف شده توسط چنین توابعی نیز هارمونیک نامیده می شود.
موقعیت جسمی که حرکت نوسانی انجام می دهد با مشخصه می شود جابه جاییدر مورد موقعیت تعادل در این مورد، مقادیر موجود در فرمول (1.1) به معنای زیر است:
ایکس- جانبداریبدن در زمان t;
ولی - دامنهنوسانات برابر با حداکثر جابجایی؛
ω - فرکانس دایره اینوسانات (تعداد نوسانات انجام شده در 2 π ثانیه)، مربوط به فرکانس نوسان با نسبت
φ = (ωt +φ 0) - فازنوسانات (در زمان t)؛ φ 0 - فاز اولیهنوسانات (در t = 0).
 برنج. 1.1.نمودارهای افست در مقابل زمان برای x(0) = A و x(0) = 0
برنج. 1.1.نمودارهای افست در مقابل زمان برای x(0) = A و x(0) = 0
 1.2. ارتعاشات رایگان نوسانات میرا نشده و میرا شده
1.2. ارتعاشات رایگان نوسانات میرا نشده و میرا شده
رایگانیا خود رانوساناتی نامیده می شود که در یک سیستم به حال خود رها شده و پس از خارج شدن از حالت تعادل رخ می دهد.
به عنوان مثال، نوسان یک توپ معلق روی یک نخ است. برای ایجاد ارتعاش، باید یا توپ را هل دهید، یا با کنار زدن آن، آن را رها کنید. هنگام هل دادن، توپ مطلع می شود جنبشیانرژی، و در صورت انحراف - پتانسیل.
نوسانات آزاد به دلیل ذخیره اولیه انرژی انجام می شود.
ارتعاشات بدون تعدیل رایگان
نوسانات آزاد را می توان تنها در صورت عدم وجود نیروی اصطکاک غیرفعال کرد. در غیر این صورت منبع اولیه انرژی صرف غلبه بر آن می شود و دامنه نوسانات کاهش می یابد.
به عنوان مثال، ارتعاشات جسم معلق روی فنر بی وزن را در نظر بگیرید که پس از انحراف بدن به سمت پایین و سپس رها شدن رخ می دهد (شکل 1.2).
 برنج. 1.2.ارتعاشات جسم روی فنر
برنج. 1.2.ارتعاشات جسم روی فنر
از کنار فنر کشیده، بدن عمل می کند نیروی الاستیک F متناسب با مقدار جابجایی ایکس:
عامل ثابت k نامیده می شود نرخ بهارو به اندازه و جنس آن بستگی دارد. علامت "-" نشان می دهد که نیروی الاستیک همیشه در جهت مخالف جهت جابجایی هدایت می شود، یعنی. به موقعیت تعادل
در غیاب اصطکاک، نیروی ارتجاعی (1.4) تنها نیرویی است که بر جسم وارد می شود. طبق قانون دوم نیوتن (ma = F):
 پس از انتقال تمام عبارت ها به سمت چپ و تقسیم بر جرم بدن (m)، یک معادله دیفرانسیل برای نوسانات آزاد در غیاب اصطکاک به دست می آوریم:
پس از انتقال تمام عبارت ها به سمت چپ و تقسیم بر جرم بدن (m)، یک معادله دیفرانسیل برای نوسانات آزاد در غیاب اصطکاک به دست می آوریم:
 مقدار ω 0 (1.6) برابر با فرکانس چرخه ای است. این فرکانس نامیده می شود خود را
مقدار ω 0 (1.6) برابر با فرکانس چرخه ای است. این فرکانس نامیده می شود خود را
بنابراین، ارتعاشات آزاد در غیاب اصطکاک هارمونیک هستند اگر هنگام انحراف از موقعیت تعادل، نیروی الاستیک(1.4).
بخشنامه خود رافرکانس مشخصه اصلی نوسانات هارمونیک آزاد است. این مقدار فقط به خواص سیستم نوسانی (در مورد مورد بررسی، به جرم بدنه و سفتی فنر) بستگی دارد. در موارد زیر، نماد ω 0 همیشه برای نشان دادن استفاده خواهد شد فرکانس دایره ای خود(یعنی فرکانسی که در آن ارتعاشات در غیاب اصطکاک رخ می دهد).
دامنه ارتعاشات آزادتوسط خواص سیستم نوسانی (m, k) و انرژی که در لحظه اولیه به آن داده می شود تعیین می شود.
در صورت عدم وجود اصطکاک، نوسانات آزاد نزدیک به نوسانات هارمونیک نیز در سیستم های دیگر ایجاد می شود: آونگ های ریاضی و فیزیکی (تئوری این مسائل در نظر گرفته نمی شود) (شکل 1.3).
آونگ ریاضی- یک جسم کوچک (نقطه مادی) که روی یک نخ بی وزن آویزان شده است (شکل 1.3 a). اگر نخ با زاویه ای کوچک (تا 5 درجه) α از حالت تعادل منحرف شود و آزاد شود، آنگاه بدن با یک دوره تعیین شده توسط فرمول نوسان می کند.
 جایی که L طول نخ است، g شتاب سقوط آزاد است.
جایی که L طول نخ است، g شتاب سقوط آزاد است.
 برنج. 1.3.آونگ ریاضی (الف)، آونگ فیزیکی (ب)
برنج. 1.3.آونگ ریاضی (الف)، آونگ فیزیکی (ب)
آونگ فیزیکی- جسم صلبی که تحت اثر گرانش حول یک محور افقی ثابت در نوسان است. شکل 1.3 b به طور شماتیک یک آونگ فیزیکی را به شکل بدنه ای با شکل دلخواه نشان می دهد که با زاویه α از موقعیت تعادل منحرف شده است. دوره نوسان یک آونگ فیزیکی با فرمول توصیف می شود
 که در آن J گشتاور اینرسی بدن نسبت به محور، m جرم، h فاصله بین مرکز ثقل (نقطه C) و محور تعلیق (نقطه O) است.
که در آن J گشتاور اینرسی بدن نسبت به محور، m جرم، h فاصله بین مرکز ثقل (نقطه C) و محور تعلیق (نقطه O) است.
ممان اینرسی کمیتی است که به جرم جسم، ابعاد و موقعیت آن نسبت به محور چرخش بستگی دارد. ممان اینرسی با استفاده از فرمول های خاص محاسبه می شود.
ارتعاشات میرایی رایگان
نیروهای اصطکاک که در سیستم های واقعی عمل می کنند به طور قابل توجهی ماهیت حرکت را تغییر می دهند: انرژی یک سیستم نوسانی دائما کاهش می یابد و نوسانات یا محو شدنیا اصلا رخ نمی دهد.
نیروی مقاومت در جهت مخالف حرکت بدنه هدایت می شود و در سرعت های نه چندان زیاد متناسب با سرعت است:
 نمودار چنین نوساناتی در شکل نشان داده شده است. 1.4.
نمودار چنین نوساناتی در شکل نشان داده شده است. 1.4.
به عنوان مشخصه درجه تضعیف، از کمیت بدون بعد استفاده می شود که نامیده می شود کاهش میرایی لگاریتمیλ.
 برنج. 1.4.جابجایی در برابر زمان برای نوسانات میرا شده
برنج. 1.4.جابجایی در برابر زمان برای نوسانات میرا شده
کاهش میرایی لگاریتمیبرابر است با لگاریتم طبیعی نسبت دامنه نوسان قبلی به دامنه نوسان بعدی.
جایی که i عدد ترتیبی نوسان است.
به راحتی می توان فهمید که کاهش میرایی لگاریتمی با فرمول بدست می آید
تضعیف قویدر
اگر شرط β ≥ ω 0 برآورده شود، سیستم بدون نوسان به وضعیت تعادل باز می گردد. چنین حرکتی نامیده می شود دوره ای.شکل 1.5 دو راه ممکن را برای بازگشت به موقعیت تعادل در طول حرکت غیر تناوبی نشان می دهد.
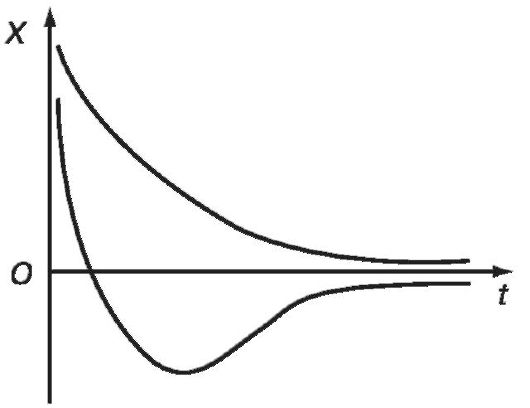 برنج. 1.5.حرکت غیر پریودیک
برنج. 1.5.حرکت غیر پریودیک
1.3. ارتعاشات اجباری، رزونانس
ارتعاشات آزاد در حضور نیروهای اصطکاک میرا می شوند. نوسانات مداوم را می توان با کمک یک عمل خارجی دوره ای ایجاد کرد.
مجبورچنین نوساناتی نامیده می شود که در طی آن سیستم نوسانی در معرض یک نیروی تناوبی خارجی قرار می گیرد (به آن نیروی محرکه می گویند).
اجازه دهید نیروی محرکه مطابق قانون هارمونیک تغییر کند
 نمودار نوسانات اجباری در شکل نشان داده شده است. 1.6.
نمودار نوسانات اجباری در شکل نشان داده شده است. 1.6.
 برنج. 1.6.نمودار جابجایی در مقابل زمان برای ارتعاشات اجباری
برنج. 1.6.نمودار جابجایی در مقابل زمان برای ارتعاشات اجباری
مشاهده می شود که دامنه نوسانات اجباری به تدریج به یک مقدار ثابت می رسد. نوسانات اجباری ثابت هارمونیک هستند و فرکانس آنها برابر فرکانس نیروی محرکه است:
دامنه (A) نوسانات اجباری ثابت با فرمول بدست می آید:
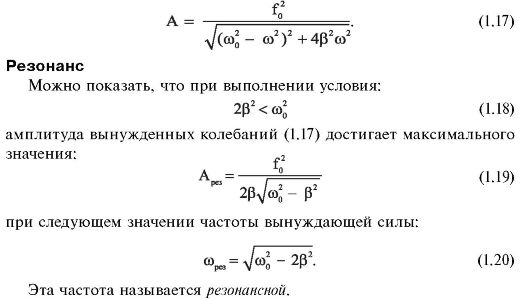 طنیندستیابی به حداکثر دامنه نوسانات اجباری در مقدار معینی از فرکانس نیروی محرکه نامیده می شود.
طنیندستیابی به حداکثر دامنه نوسانات اجباری در مقدار معینی از فرکانس نیروی محرکه نامیده می شود.
اگر شرط (1.18) برآورده نشود، رزونانس ایجاد نمی شود. در این حالت، با افزایش فرکانس نیروی محرکه، دامنه نوسانات اجباری به صورت یکنواخت کاهش می یابد و به سمت صفر میل می کند.
وابستگی گرافیکی دامنه A نوسانات اجباری به فرکانس دایره ای نیروی محرکه برای مقادیر مختلف ضریب میرایی (β1 > β2 > β3) در شکل نشان داده شده است. 1.7. به چنین مجموعه ای از نمودارها، منحنی های تشدید می گویند.
در برخی موارد، افزایش شدید دامنه نوسانات در رزونانس برای قدرت سیستم خطرناک است. مواردی وجود دارد که رزونانس منجر به تخریب سازه ها می شود.
 برنج. 1.7.منحنی های رزونانس
برنج. 1.7.منحنی های رزونانس
1.4. مقایسه فرآیندهای نوسانی. انرژی نوسانات هارمونیک میرایی نشده
جدول 1.1 ویژگی های فرآیندهای نوسانی در نظر گرفته شده را نشان می دهد.
جدول 1.1.ویژگی های ارتعاشات آزاد و اجباری
 انرژی نوسانات هارمونیک میرایی نشده
انرژی نوسانات هارمونیک میرایی نشده
جسمی که نوسانات هارمونیک را انجام می دهد دارای دو نوع انرژی است: انرژی جنبشی حرکت E k \u003d mv 2/2 و انرژی پتانسیل E p مرتبط با عمل یک نیروی الاستیک. مشخص است که تحت اثر نیروی کشسان (1.4) انرژی پتانسیل جسم با فرمول E p = kx 2/2 تعیین می شود. برای نوسانات بدون میر ایکس= یک cos(ωt)، و سرعت بدنه با فرمول تعیین می شود v= - A ωsin(ωt). از این، عباراتی برای انرژی های جسمی که نوسانات بدون میرا انجام می دهد به دست می آید:
 انرژی کل سیستمی که در آن نوسانات هارمونیک میرایی نشده اتفاق می افتد مجموع این انرژی ها است و بدون تغییر باقی می ماند:
انرژی کل سیستمی که در آن نوسانات هارمونیک میرایی نشده اتفاق می افتد مجموع این انرژی ها است و بدون تغییر باقی می ماند:
در اینجا m جرم جسم است، ω و A فرکانس دایره ای و دامنه نوسانات، k ضریب کشش است.
1.5. نوسانات خود
سیستم هایی وجود دارند که خود پر کردن دوره ای انرژی از دست رفته را تنظیم می کنند و بنابراین می توانند برای مدت طولانی در نوسان باشند.
نوسانات خود- نوسانات بدون میرایی که توسط یک منبع انرژی خارجی پشتیبانی می شود که تامین آن توسط خود سیستم نوسانی تنظیم می شود.
سیستم هایی که در آنها چنین نوساناتی رخ می دهد نامیده می شوند خود نوسانیدامنه و فرکانس خود نوسانات به ویژگی های خود سیستم خود نوسانی بستگی دارد. سیستم خود نوسانی را می توان با طرح زیر نشان داد:
 در این حالت، خود سیستم نوسانی از طریق یک کانال بازخورد، تنظیم کننده انرژی را تحت تأثیر قرار می دهد و آن را از وضعیت سیستم مطلع می کند.
در این حالت، خود سیستم نوسانی از طریق یک کانال بازخورد، تنظیم کننده انرژی را تحت تأثیر قرار می دهد و آن را از وضعیت سیستم مطلع می کند.
بازخوردتأثیر نتایج هر فرآیند بر روند آن نامیده می شود.
اگر چنین تأثیری منجر به افزایش شدت فرآیند شود، بازخورد نامیده می شود مثبتاگر ضربه منجر به کاهش شدت فرآیند شود، بازخورد نامیده می شود منفی.
در یک سیستم خود نوسان، بازخورد مثبت و منفی می تواند وجود داشته باشد.
نمونه ای از سیستم های خود نوسان ساعتی است که در آن آونگ به دلیل انرژی یک وزنه برآمده یا فنر پیچ خورده ضربه هایی را دریافت می کند و این ضربه ها در لحظاتی اتفاق می افتد که آونگ از موقعیت وسط عبور می کند.
نمونه هایی از سیستم های بیولوژیکی خود نوسانی اندام هایی مانند قلب و ریه ها هستند.
1.6. نوسانات بدن انسان و ثبت آنها
تجزیه و تحلیل نوسانات ایجاد شده توسط بدن انسان یا بخش های جداگانه آن به طور گسترده در عمل پزشکی استفاده می شود.
حرکات نوسانی بدن انسان هنگام راه رفتن
راه رفتن یک فرآیند حرکتی دوره ای پیچیده است که از فعالیت هماهنگ ماهیچه های اسکلتی تنه و اندام ها ناشی می شود. تجزیه و تحلیل روند راه رفتن ویژگی های تشخیصی بسیاری را ارائه می دهد.
یکی از ویژگی های بارز راه رفتن تناوب بودن وضعیت حمایت با یک پا (دوره تکیه گاه) یا دو پا (دوره حمایت مضاعف) است. به طور معمول، نسبت این دوره ها 4:1 است. هنگام راه رفتن، یک جابجایی دوره ای مرکز جرم (CM) در امتداد محور عمودی (به طور معمول 5 سانتی متر) و انحراف به سمت (به طور معمول 2.5 سانتی متر) وجود دارد. در این مورد، CM در امتداد یک منحنی حرکت می کند، که می تواند تقریباً با یک تابع هارمونیک نمایش داده شود (شکل 1.8).
 برنج. 1.8.جابجایی عمودی CM بدن انسان در حین راه رفتن
برنج. 1.8.جابجایی عمودی CM بدن انسان در حین راه رفتن
حرکات نوسانی پیچیده با حفظ وضعیت عمودی بدن.
فردی که به صورت عمودی ایستاده است، نوسانات پیچیده مرکز جرم مشترک (MCM) و مرکز فشار (CP) پاها را روی صفحه پشتیبانی تجربه می کند. بر اساس تحلیل این نوسانات استاتوکینسیمتری- روشی برای ارزیابی توانایی فرد در حفظ وضعیت عمودی. با نگه داشتن پروجکشن GCM در مختصات مرز ناحیه پشتیبانی. این روش با استفاده از یک آنالایزر پایدار سنجی اجرا می شود که قسمت اصلی آن یک سکوی استابیلوپ است که سوژه در حالت عمودی روی آن قرار دارد. نوسانات ایجاد شده توسط CP سوژه در حالی که وضعیت عمودی را حفظ می کند به سکوی استابیلوپ منتقل می شود و توسط فشار سنج های ویژه ثبت می شود. سیگنال های فشار سنج به دستگاه ضبط منتقل می شود. در عین حال ثبت می شود استاتوکینزیگرام -مسیر حرکت آزمودنی بر روی صفحه افقی در یک سیستم مختصات دو بعدی. با توجه به طیف هارمونیک استاتوکینزیگرام هامی توان ویژگی های عمودی سازی را در هنجار و با انحراف از آن قضاوت کرد. این روش امکان تجزیه و تحلیل شاخص های پایداری استاتوکینتیک (SCR) یک فرد را فراهم می کند.
ارتعاشات مکانیکی قلب
روش های مختلفی برای مطالعه قلب وجود دارد که مبتنی بر فرآیندهای دوره ای مکانیکی است.
بالیستوکاردیوگرافی(BCG) - روشی برای مطالعه تظاهرات مکانیکی فعالیت قلبی، بر اساس ثبت حرکات ریز پالس بدن، ناشی از خروج خون از بطن های قلب به عروق بزرگ. این باعث ایجاد پدیده می شود برمی گرداند.بدن انسان بر روی یک سکوی متحرک مخصوص که بر روی یک میز ثابت عظیم قرار دارد قرار می گیرد. سکو در نتیجه پس زدن وارد یک حرکت نوسانی پیچیده می شود. وابستگی جابجایی پلت فرم با بدن به زمان، بالیستوکاردیوگرام نامیده می شود (شکل 1.9)، که تجزیه و تحلیل آن به شخص اجازه می دهد تا حرکت خون و وضعیت فعالیت قلبی را قضاوت کند.
آپکس کاردیوگرافی(AKG) - روشی برای ثبت گرافیکی نوسانات با فرکانس پایین قفسه سینه در ناحیه ضربان راس، ناشی از کار قلب. ثبت اپکس کاردیوگرام، به عنوان یک قاعده، در یک الکتروکاردیوگرام چند کاناله انجام می شود.
 برنج. 1.9.ثبت بالیستوکاردیوگرام
برنج. 1.9.ثبت بالیستوکاردیوگرام
با استفاده از حسگر پیزوکریستالی، که مبدل ارتعاشات مکانیکی به الکتریکی است، نمودار را ترسیم کنید. قبل از ثبت بر روی دیواره قدامی قفسه سینه، نقطه حداکثر ضربان (ضربان آپکس) با لمس تعیین می شود که در آن سنسور ثابت می شود. بر اساس سیگنال های حسگر، یک آپکس کاردیوگرام به طور خودکار ساخته می شود. تجزیه و تحلیل دامنه ACG انجام می شود - دامنه منحنی در مراحل مختلف کار قلب با حداکثر انحراف از خط صفر مقایسه می شود - بخش EO که 100٪ در نظر گرفته شده است. شکل 1.10 آپکس کاردیوگرام را نشان می دهد.
 برنج. 1.10.ضبط آپکس کاردیوگرام
برنج. 1.10.ضبط آپکس کاردیوگرام
سینتوکاردیوگرافی(KKG) - روشی برای ثبت ارتعاشات با فرکانس پایین دیواره قفسه سینه، ناشی از فعالیت قلبی. کینتوکاردیوگرام با آپکس کاردیوگرام متفاوت است: اولی حرکات مطلق دیواره قفسه سینه را در فضا ثبت می کند، دومی نوسانات فضاهای بین دنده ای را نسبت به دنده ها ثبت می کند. این روش جابجایی (KKG x)، سرعت حرکت (KKG v) و همچنین شتاب (KKG a) را برای نوسانات قفسه سینه تعیین می کند. شکل 1.11 مقایسه ای از کینتوکاردیوگرام های مختلف را نشان می دهد.
 برنج. 1.11.ثبت کینتوکاردیوگرام جابجایی (x)، سرعت (v)، شتاب (a)
برنج. 1.11.ثبت کینتوکاردیوگرام جابجایی (x)، سرعت (v)، شتاب (a)
دیناموکاردیوگرافی(DKG) - روشی برای ارزیابی حرکت مرکز ثقل قفسه سینه. دیناموکاردیوگراف به شما امکان می دهد نیروهای وارد شده از قفسه سینه انسان را ثبت کنید. برای ثبت دیناموکاردیوگرام، بیمار روی میز دراز کشیده به پشت قرار می گیرد. زیر سینه یک دستگاه درک وجود دارد که از دو صفحه فلزی سفت و سخت به ابعاد 30x30 سانتی متر تشکیل شده است که بین آنها عناصر الاستیک با فشار سنج نصب شده است. باری که بر روی دستگاه گیرنده اعمال می شود از سه جزء تشکیل شده است: 1) یک جزء ثابت - جرم قفسه سینه. 2) متغیر - اثر مکانیکی حرکات تنفسی. 3) متغیر - فرآیندهای مکانیکی همراه با انقباض قلبی.
ضبط دیناموکاردیوگرام در حالی که نفس سوژه را در دو جهت نگه می دارد انجام می شود: نسبت به محورهای طولی و عرضی دستگاه گیرنده. مقایسه دیناموکاردیوگرام های مختلف در شکل 1 نشان داده شده است. 1.12.
سیسموکاردیوگرافیبر اساس ثبت ارتعاشات مکانیکی بدن انسان ناشی از کار قلب است. در این روش با استفاده از حسگرهای نصب شده در ناحیه پایه فرآیند xiphoid، یک تکانه قلبی به دلیل فعالیت مکانیکی قلب در طول دوره انقباض ثبت می شود. در همان زمان، فرآیندهای مرتبط با فعالیت گیرنده های مکانیکی بافتی بستر عروقی رخ می دهد که با کاهش حجم خون در گردش فعال می شوند. لرزه قلبی شکل نوسانات جناغ را تشکیل می دهد.
 برنج. 1.12.ثبت دیناموکاردیوگرام های طبیعی طولی (الف) و عرضی (ب).
برنج. 1.12.ثبت دیناموکاردیوگرام های طبیعی طولی (الف) و عرضی (ب).
لرزش
ورود گسترده ماشین ها و مکانیسم های مختلف به زندگی انسان باعث افزایش بهره وری نیروی کار می شود. با این حال، کار بسیاری از مکانیسم ها با وقوع ارتعاشاتی همراه است که به شخص منتقل می شود و تأثیر مضری بر او می گذارد.
لرزش- نوسانات اجباری بدن که در آن یا کل بدن به طور کلی نوسان می کند یا قسمت های جداگانه آن با دامنه ها و فرکانس های مختلف نوسان می کند.
یک فرد به طور مداوم انواع مختلفی از اثرات ارتعاشی را در حمل و نقل، محل کار، خانه تجربه می کند. ارتعاشاتی که در هر جای بدن (مثلاً دست کارگری که چکش در دست دارد) به وجود آمده است به صورت امواج الاستیک در سراسر بدن منتشر می شود. این امواج باعث ایجاد تغییر شکل های متغیر در انواع مختلف در بافت های بدن (فشردگی، کشش، برش، خمش) می شوند. تأثیر ارتعاشات بر روی شخص به دلیل عوامل زیادی است که ارتعاشات را مشخص می کند: فرکانس (طیف فرکانس، فرکانس اساسی)، دامنه، سرعت و شتاب یک نقطه نوسان، انرژی فرآیندهای نوسانی.
قرار گرفتن طولانی مدت در معرض ارتعاشات باعث اختلالات مداوم در عملکردهای فیزیولوژیکی طبیعی در بدن می شود. "بیماری ارتعاش" ممکن است رخ دهد. این بیماری منجر به تعدادی از اختلالات جدی در بدن انسان می شود.
تأثیر ارتعاشات بر بدن بستگی به شدت، فرکانس، مدت ارتعاشات، مکان اعمال و جهت آنها در رابطه با بدن، وضعیت بدن و همچنین به وضعیت فرد و ویژگی های فردی او دارد.
نوسانات با فرکانس 3-5 هرتز باعث واکنش های دستگاه دهلیزی، اختلالات عروقی می شود. در فرکانس های 3-15 هرتز، اختلالات مرتبط با ارتعاشات رزونانسی اندام های فردی (کبد، معده، سر) و بدن به طور کلی مشاهده می شود. نوسانات با فرکانس های 11-45 هرتز باعث تاری دید، تهوع و استفراغ می شود. در فرکانس های بیش از 45 هرتز، آسیب به عروق مغز، اختلال در گردش خون و غیره رخ می دهد. شکل 1.13 محدوده فرکانس ارتعاشی را نشان می دهد که تأثیر مضری بر شخص و سیستم های اندام او دارد.
 برنج. 1.13.محدوده فرکانس اثرات مضر ارتعاش بر انسان
برنج. 1.13.محدوده فرکانس اثرات مضر ارتعاش بر انسان
در عین حال در مواردی از ارتعاشات در پزشکی استفاده می شود. به عنوان مثال، دندانپزشک با استفاده از ویبراتور مخصوص، یک آمالگام تهیه می کند. استفاده از دستگاههای ارتعاشی با فرکانس بالا باعث ایجاد سوراخی با شکل پیچیده در دندان میشود.
از ویبره در ماساژ نیز استفاده می شود. با ماساژ دستی، بافت های ماساژ داده شده با کمک دستان ماساژور وارد حرکت نوسانی می شوند. در ماساژ سخت افزاری از ویبراتورها استفاده می شود که در آن از نوک هایی با اشکال مختلف برای انتقال حرکات نوسانی به بدن استفاده می شود. دستگاههای ارتعاشی به دستگاههایی برای لرزش عمومی تقسیم میشوند که باعث لرزش کل بدن میشوند (ارتعاش «صندلی»، «تخت»، «سکو»، و غیره) و دستگاههایی برای تأثیر ارتعاش موضعی بر روی قسمتهای مختلف بدن.
مکانیسم درمانی
در تمرینات فیزیوتراپی (LFK) از شبیه سازهایی استفاده می شود که بر روی آنها حرکات نوسانی قسمت های مختلف بدن انسان انجام می شود. در استفاده می شوند مکانیک درمانی -شکلی از ورزش درمانی که یکی از وظایف آن اجرای تمرینات بدنی با دوز و ریتمیک مکرر به منظور تمرین یا بازگرداندن تحرک در مفاصل در دستگاه های آونگی است. اساس این دستگاه ها تعادل (از fr. متعادل کننده- تاب، تعادل) آونگ، که یک اهرم دو بازویی است که حرکات نوسانی (تکانی) را حول یک محور ثابت انجام می دهد.
1.7. مفاهیم و فرمول های اساسی
 ادامه جدول
ادامه جدول
 ادامه جدول
ادامه جدول
 انتهای جدول
انتهای جدول
 1.8. وظایف
1.8. وظایف
1. نمونه هایی از سیستم های نوسانی در انسان را ذکر کنید.
2. در یک فرد بالغ، قلب 70 انقباض در دقیقه ایجاد می کند. تعیین: الف) فراوانی انقباضات. ب) تعداد برش ها در 50 سال
پاسخ:الف) 1.17 هرتز؛ ب) 1.84x10 9.
3. یک آونگ ریاضی چه طولی باید داشته باشد تا دوره نوسان آن برابر با 1 ثانیه باشد؟
 4.
یک میله همگن مستقیم نازک به طول 1 متر از انتهای آن بر روی یک محور معلق است. تعیین کنید: الف) دوره نوسانات آن چقدر است (کوچک)؟ ب) طول آونگ ریاضی با همان دوره نوسان چقدر است؟
4.
یک میله همگن مستقیم نازک به طول 1 متر از انتهای آن بر روی یک محور معلق است. تعیین کنید: الف) دوره نوسانات آن چقدر است (کوچک)؟ ب) طول آونگ ریاضی با همان دوره نوسان چقدر است؟
 5.
جسمی با جرم 1 کیلوگرم طبق قانون x = 0.42 cos (7.40t) نوسان می کند، که t بر حسب ثانیه و x بر حسب متر اندازه گیری می شود. پیدا کنید: الف) دامنه؛ ب) فرکانس؛ ج) انرژی کل؛ د) انرژی های جنبشی و پتانسیل در x = 0.16 متر.
5.
جسمی با جرم 1 کیلوگرم طبق قانون x = 0.42 cos (7.40t) نوسان می کند، که t بر حسب ثانیه و x بر حسب متر اندازه گیری می شود. پیدا کنید: الف) دامنه؛ ب) فرکانس؛ ج) انرژی کل؛ د) انرژی های جنبشی و پتانسیل در x = 0.16 متر.
 6.
سرعت راه رفتن فرد با طول گام را تخمین بزنید ل= 0.65 متر طول پا L = 0.8 متر. مرکز ثقل در فاصله H = 0.5 متر از پا قرار دارد. برای لحظه اینرسی پا نسبت به مفصل ران، از فرمول I = 0.2mL 2 استفاده کنید.
6.
سرعت راه رفتن فرد با طول گام را تخمین بزنید ل= 0.65 متر طول پا L = 0.8 متر. مرکز ثقل در فاصله H = 0.5 متر از پا قرار دارد. برای لحظه اینرسی پا نسبت به مفصل ران، از فرمول I = 0.2mL 2 استفاده کنید.
 7.
اگر یک ساعت، فنر و مجموعه ای از وزنه ها در اختیار دارید، چگونه می توانید جرم یک جسم کوچک را در ایستگاه فضایی تعیین کنید؟
7.
اگر یک ساعت، فنر و مجموعه ای از وزنه ها در اختیار دارید، چگونه می توانید جرم یک جسم کوچک را در ایستگاه فضایی تعیین کنید؟
 8.
دامنه نوسانات میرا در 10 نوسان به میزان 1/10 مقدار اولیه کاهش می یابد. دوره نوسان T = 0.4 ثانیه. ضریب کاهش و میرایی لگاریتمی را تعیین کنید.
8.
دامنه نوسانات میرا در 10 نوسان به میزان 1/10 مقدار اولیه کاهش می یابد. دوره نوسان T = 0.4 ثانیه. ضریب کاهش و میرایی لگاریتمی را تعیین کنید.
مشخصه نوسان
فازوضعیت سیستم یعنی مختصات، سرعت، شتاب، انرژی و غیره را تعیین می کند.
فرکانس چرخه ایسرعت تغییر فاز نوسان را مشخص می کند.


وضعیت اولیه سیستم نوسانی مشخص می شود فاز اولیه
دامنه نوسان Aبزرگترین جابجایی از موقعیت تعادل است
دوره T- این دوره زمانی است که در طی آن نقطه یک نوسان کامل انجام می دهد.
فرکانس نوسانتعداد نوسانات کامل در واحد زمان t است.

فرکانس، فرکانس چرخه ای و دوره نوسان به عنوان مرتبط هستند

انواع ارتعاشات
ارتعاشاتی که در سیستم های بسته رخ می دهد نامیده می شوند رایگانیا خود رانوسانات ارتعاشاتی که تحت تأثیر نیروهای خارجی ایجاد می شوند نامیده می شوند مجبور شد. نیز وجود دارد خود نوسانات(اجباری به طور خودکار).
اگر نوسانات را با توجه به ویژگی های متغیر (دامنه، فرکانس، دوره و غیره) در نظر بگیریم، می توان آنها را به دو دسته تقسیم کرد. هارمونیک, محو شدن, رو به رشد(و همچنین دندان اره ای، مستطیلی، پیچیده).
در طول ارتعاشات آزاد در سیستم های واقعی، تلفات انرژی همیشه رخ می دهد. انرژی مکانیکی به عنوان مثال برای انجام کار برای غلبه بر نیروهای مقاومت هوا صرف می شود. تحت تأثیر نیروی اصطکاک، دامنه نوسان کاهش می یابد و پس از مدتی نوسانات متوقف می شود. واضح است که هر چه نیروی مقاومت در برابر حرکت بیشتر باشد، نوسانات سریعتر متوقف می شوند.

ارتعاشات اجباری طنین
نوسانات اجباری میرا نشده اند. بنابراین، لازم است تلفات انرژی برای هر دوره نوسان دوباره پر شود. برای انجام این کار، لازم است بر روی یک جسم نوسانی با نیرویی که به طور متناوب در حال تغییر است، عمل کنید. نوسانات اجباری با فرکانس برابر با فرکانس تغییرات نیروی خارجی انجام می شود.

ارتعاشات اجباری
دامنه نوسانات مکانیکی اجباری در صورتی به حداکثر مقدار خود می رسد که فرکانس نیروی محرکه با فرکانس سیستم نوسانی منطبق باشد. این پدیده نامیده می شود رزونانس.
به عنوان مثال، اگر به طور دوره ای طناب را با نوسانات خود به موقع بکشید، متوجه افزایش دامنه نوسانات آن خواهیم شد.

اگر انگشت خیس را در امتداد لبه لیوان حرکت دهید، شیشه صدای زنگ می دهد. اگرچه انگشت قابل توجه نیست، اما به طور متناوب حرکت می کند و انرژی را در فواصل کوتاه به شیشه منتقل می کند و باعث ارتعاش شیشه می شود.

اگر یک موج صوتی با فرکانس برابر با فرکانس خود به سمت آن هدایت شود، دیواره های شیشه نیز شروع به ارتعاش می کنند. اگر دامنه بسیار بزرگ شود، حتی ممکن است شیشه بشکند. به دلیل طنین در هنگام آواز F.I. Chaliapin، آویزهای کریستالی لوسترها می لرزیدند (طنین انداز شدند). ظهور رزونانس را می توان در حمام ردیابی کرد. اگر صداهای فرکانس های مختلف را به آرامی بخوانید، طنین در یکی از فرکانس ها رخ می دهد.
در آلات موسیقی نقش طنین انداز توسط قسمت هایی از بدن آنها انجام می شود. فرد همچنین تشدید کننده خود را دارد - این حفره دهان است که صداهای ایجاد شده را تقویت می کند.
پدیده رزونانس باید در عمل مورد توجه قرار گیرد. در برخی شرایط می تواند مفید باشد، در برخی دیگر می تواند مضر باشد. پدیده های رزونانسی می توانند صدمات جبران ناپذیری به سیستم های مکانیکی مختلف مانند پل هایی که به درستی طراحی نشده اند، وارد کنند. بنابراین، در سال 1905، پل مصر در سن پترزبورگ با عبور یک اسکادران سوارکاری از روی آن فروریخت و در سال 1940، پل تاکوما در ایالات متحده آمریکا فرو ریخت.
پدیده رزونانس زمانی استفاده می شود که با کمک یک نیروی کوچک، افزایش زیادی در دامنه نوسانات لازم باشد. به عنوان مثال، زبان سنگین یک زنگ بزرگ را می توان با نیروی نسبتاً کمی با فرکانس برابر با فرکانس طبیعی زنگ تاب داد.
(یا ارتعاشات طبیعی) ارتعاشات یک سیستم نوسانی هستند که تنها به دلیل انرژی گزارش شده اولیه (پتانسیل یا جنبشی) در غیاب تأثیرات خارجی انجام می شوند.
انرژی پتانسیل یا جنبشی را می توان به عنوان مثال در سیستم های مکانیکی از طریق یک جابجایی اولیه یا یک سرعت اولیه انتقال داد.
اجسام در حال نوسان آزاد همیشه با اجسام دیگر تعامل دارند و همراه با آنها سیستمی از اجسام را تشکیل می دهند که به آن می گویند سیستم نوسانی.
به عنوان مثال، یک فنر، یک توپ و یک ستون عمودی که انتهای بالایی فنر به آن متصل است (شکل زیر را ببینید) در یک سیستم نوسانی گنجانده شده است. در اینجا توپ آزادانه در طول رشته می لغزد (نیروهای اصطکاک ناچیز است). اگر توپ را به سمت راست ببرید و آن را به حال خود رها کنید، آزادانه در اطراف موقعیت تعادل (نقطه) نوسان می کند. O) در اثر عمل نیروی کشسان فنر به سمت وضعیت تعادل هدایت می شود.
یکی دیگر از نمونه های کلاسیک سیستم نوسانی مکانیکی، آونگ ریاضی است (شکل زیر را ببینید). در این حالت، توپ تحت تأثیر دو نیرو، نوسانات آزاد را انجام می دهد: گرانش و نیروی کشسانی نخ (زمین نیز وارد سیستم نوسانی می شود). نتیجه آنها به موقعیت تعادل هدایت می شود.

نیروهایی که بین بدنه های یک سیستم نوسانی اعمال می شود نامیده می شود نیروهای داخلی. نیروهای خارجینیروهای وارد بر سیستم از اجسامی که در آن نیستند نامیده می شوند. از این دیدگاه، نوسانات آزاد را می توان به عنوان نوسانات سیستم تحت تأثیر نیروهای داخلی پس از خارج شدن سیستم از حالت تعادل تعریف کرد.
شرایط وقوع نوسانات آزاد عبارتند از:
1) ظهور نیرویی در آنها که سیستم را پس از خارج شدن از این حالت به وضعیت تعادل پایدار باز می گرداند.
2) بدون اصطکاک در سیستم.
دینامیک نوسانات آزاد
ارتعاشات جسم تحت تأثیر نیروهای کشسان. معادله حرکت نوسانی جسم تحت تأثیر نیروی کشسان اف() را می توان با در نظر گرفتن قانون دوم نیوتن به دست آورد ( F = ما) و قانون هوک ( کنترل F = -kx)، جایی که مترجرم توپ است و شتابی است که توپ تحت تأثیر نیروی کشسان به دست می آورد. ک- ضریب سختی فنر، ایکسجابجایی جسم از وضعیت تعادل است (هر دو معادله به صورت طرح ریزی بر روی محور افقی نوشته می شوند. اوه). معادل سازی اضلاع راست این معادلات و در نظر گرفتن اینکه شتاب آمشتق دوم مختصات است ایکس(تغییرها)، دریافت می کنیم:
 .
.
به طور مشابه، عبارت برای شتاب آبا تمایز بدست می آوریم ( v = -v m sin ω 0 t = -v m x m cos (ω 0 t + π/2)):
a \u003d -a m cos ω 0 t،
جایی که a m = ω 2 0 x mدامنه شتاب است. بنابراین، دامنه سرعت نوسانات هارمونیک متناسب با فرکانس و دامنه شتاب متناسب با مجذور فرکانس نوسان است.